Kernel![]() Supported devices
Supported devices
Updated Jul 2025
Customization
FreeRTOS is customized using a configuration file called FreeRTOSConfig.h. Every FreeRTOS application must have a FreeRTOSConfig.h header file in its pre-processor include path. FreeRTOSConfig.h tailors the RTOS kernel to the application being built. It is therefore specific to the application, not the RTOS, and should be located in an application directory, not in one of the RTOS kernel source code directories.
Each demo application included in the RTOS source code download has its own FreeRTOSConfig.h file. Some of the demos are quite old and do not contain all the available configuration options. Configuration options that are omitted are set to a default value within an RTOS source file.
Here is a typical FreeRTOSConfig.h definition, followed by an explanation of each parameter:
'config' Parameters
configUSE_PREEMPTION
Set to 1 to use the preemptive RTOS scheduler, or 0 to use the cooperative RTOS scheduler.
configUSE_PORT_OPTIMISED_TASK_SELECTION
Some FreeRTOS ports have two methods of selecting the next task to execute - a generic method, and a method that is specific to that port.
The Generic method:
- Is used when is set to 0, or when a port specific method is not implemented.configUSE_PORT_OPTIMISED_TASK_SELECTION
- Can be used with all FreeRTOS ports.
- Is completely written in C, making it less efficient than a port specific method.
- Does not impose a limit on the maximum number of available priorities.
A port specific method:
- Is not available for all ports.
- Is used when is set to 1.configUSE_PORT_OPTIMISED_TASK_SELECTION
- Relies on one or more architecture specific assembly instructions (typically a Count Leading Zeros [CLZ] or equivalent instruction) so can only be used with the architecture for which it was specifically written.
- Is more efficient than the generic method.
- Typically imposes a limit of 32 on the maximum number of available priorities.
configUSE_TICKLESS_IDLE
Set
configUSE_TICKLESS_IDLEconfigUSE_IDLE_HOOK
Set to 1 if you wish to use an idle hook, or 0 to omit an idle hook.
configUSE_MALLOC_FAILED_HOOK
The kernel uses a call to
pvPortMalloc()configUSE_MALLOC_FAILED_HOOKThe
malloc()pvPortMalloc()If
configUSE_MALLOC_FAILED_HOOKmalloc()configUSE_MALLOC_FAILED_HOOKmalloc()malloc()
configUSE_DAEMON_TASK_STARTUP_HOOK
If
configUSE_TIMERSconfigUSE_DAEMON_TASK_STARTUP_HOOK
configUSE_SB_COMPLETED_CALLBACK
Setting
configUSE_SB_COMPLETED_CALLBACK()xStreamBufferCreateWithCallback()xStreamBufferCreateStaticWithCallback()xStreamBufferCreate()xStreamBufferCreateStatic()sbSEND_COMPLETED()sbRECEVE_COMPLETED()configUSE_SB_COMPLETED_CALLBACKconfigUSE_TICK_HOOK
Set to 1 if you wish to use an tick hook, or 0 to omit an tick hook.
configCPU_CLOCK_HZ
Enter the frequency in Hz at which the internal clock that drives the peripheral used to generate the tick interrupt will be executing - this is normally the same clock that drives the internal CPU clock. This value is required in order to correctly configure timer peripherals.
configSYSTICK_CLOCK_HZ
Optional parameter for ARM Cortex-M ports only.
By default ARM Cortex-M ports generate the RTOS tick interrupt from the Cortex-M SysTick timer. Most Cortex-M MCUs run the SysTick timer at the same frequency as the MCU itself - when that is the case
configSYSTICK_CLOCK_HZconfigCPU_CLOCK_HZconfigSYSTICK_CLOCK_HZconfigTICK_RATE_HZ
The frequency of the RTOS tick interrupt.
The tick interrupt is used to measure time. Therefore a higher tick frequency means time can be measured to a higher resolution. However, a high tick frequency also means that the RTOS kernel will use more CPU time so be less efficient. The RTOS demo applications all use a tick rate of 1000Hz. This is used to test the RTOS kernel and is higher than would normally be required.
More than one task can share the same priority. The RTOS scheduler will share processor time between tasks of the same priority by switching between the tasks during each RTOS tick. A high tick rate frequency will therefore also have the effect of reducing the 'time slice' given to each task.
configMAX_PRIORITIES
The number of priorities available to the application tasks. Any number of tasks can share the same priority. Co-routines are prioritised separately - see
configMAX_CO_ROUTINE_PRIORITIESEach available priority consumes a little RAM within the RTOS kernel so this value should not be set any higher than actually required by your application.
The maximum permissible value will be capped if configUSE_PORT_OPTIMISED_TASK_SELECTION is set to 1.
configMINIMAL_STACK_SIZE
The size of the stack used by the idle task. Generally this should not be reduced from the value set in the FreeRTOSConfig.h file provided with the demo application for the port you are using.
Like the stack size parameter to the xTaskCreate() and xTaskCreateStatic() functions, the stack size is specified in words, not bytes. If each item placed on the stack is 32-bits, then a stack size of 100 means 400 bytes (each 32-bit stack item consuming 4 bytes).
configMAX_TASK_NAME_LEN
The maximum permissible length of the descriptive name given to a task when the task is created. The length is specified in the number of characters including the NULL termination byte.
configUSE_TRACE_FACILITY
Set to 1 if you wish to include additional structure members and functions to assist with execution visualisation and tracing.
configUSE_STATS_FORMATTING_FUNCTIONS
Set
configUSE_TRACE_FACILITYconfigUSE_STATS_FORMATTING_FUNCTIONSvTaskList()vTaskGetRunTimeStates()configUSE_16_BIT_TICKS
Time is measured in 'ticks' - which is the number of times the tick interrupt has executed since the RTOS kernel was started. The tick count is held in a variable of type
TickType_tDefining
configUSE_16_BIT_TICKSTickType_tconfigUSE_16_BIT_TICKSTickType_tUsing a 16 bit type will greatly improve performance on 8 and 16 bit architectures, but limits the maximum specifiable time period to 65535 'ticks'. Therefore, assuming a tick frequency of 250Hz, the maximum time a task can delay or block when a 16bit counter is used is 262 seconds, compared to 17179869 seconds when using a 32bit counter.
configIDLE_SHOULD_YIELD
This parameter controls the behaviour of tasks at the idle priority. It only has an effect if:
- The preemptive scheduler is being used.
- The application creates tasks that run at the idle priority.
If
configUSE_TIME_SLICINGWhen tasks share the idle priority the behaviour can be slightly different. If
configIDLE_SHOULD_YIELD
The diagram above shows the execution pattern of four tasks that are all running at the idle priority. Tasks A, B and C are application tasks. Task I is the idle task. A context switch occurs with regular period at times T0, T1, ..., T6. When the idle task yields task A starts to execute - but the idle task has already consumed some of the current time slice. This results in task I and task A effectively sharing the same time slice. The application tasks B and C therefore get more processing time than the application task A.
This situation can be avoided by:
- If appropriate, using an idle hook in place of separate tasks at the idle priority.
- Creating all application tasks at a priority greater than the idle priority.
- Setting to 0.configIDLE_SHOULD_YIELD
Setting
configIDLE_SHOULD_YIELDconfigUSE_TASK_NOTIFICATIONS
Setting
configUSE_TASK_NOTIFICATIONSconfigUSE_TASK_NOTIFICATIONSSetting
configUSE_TASK_NOTIFICATIONSEach task consumes 8 additional bytes of RAM when direct to task notifications are included in the build.
configTASK_NOTIFICATION_ARRAY_ENTRIES
Each RTOS task has an array of task notifications.
configTASK_NOTIFICATION_ARRAY_ENTRIESPrior to FreeRTOS V10.4.0 tasks only had a single notification value, not an array of values, so for backward compatibility
configTASK_NOTIFICATION_ARRAY_ENTRIESconfigUSE_MUTEXES
Set to 1 to include mutex functionality in the build, or 0 to omit mutex functionality from the build. Readers should familiarise themselves with the differences between mutexes and binary semaphores in relation to the FreeRTOS functionality.
configUSE_RECURSIVE_MUTEXES
Set to 1 to include recursive mutex functionality in the build, or 0 to omit recursive mutex functionality from the build.
configUSE_COUNTING_SEMAPHORES
Set to 1 to include counting semaphore functionality in the build, or 0 to omit counting semaphore functionality from the build.
configUSE_ALTERNATIVE_API
Set to 1 to include the 'alternative' queue functions in the build, or 0 to omit the 'alternative' queue functions from the build. The alternative API is described within the queue.h header file. The alternative API is deprecated and should not be used in new designs.
configCHECK_FOR_STACK_OVERFLOW
The stack overflow detection page describes the use of this parameter.
configQUEUE_REGISTRY_SIZE
The queue registry has two purposes, both of which are associated with RTOS kernel aware debugging:
- It allows a textual name to be associated with a queue for easy queue identification within a debugging GUI.
- It contains the information required by a debugger to locate each registered queue and semaphore.
The queue registry has no purpose unless you are using a RTOS kernel aware debugger.
configQUEUE_REGISTRY_SIZEconfigUSE_QUEUE_SETS
Set to 1 to include queue set functionality (the ability to block, or pend, on multiple queues and semaphores), or 0 to omit queue set functionality.
configUSE_TIME_SLICING
By default (if
configUSE_TIME_SLICINGconfigUSE_TIME_SLICINGconfigUSE_TIME_SLICINGconfigUSE_NEWLIB_REENTRANT
If
configUSE_NEWLIB_REENTRANT reent structure
will be allocated for each created task.
reent structure
will be allocated for each created task.
Note Newlib support has been included by popular demand, but is not used by the FreeRTOS maintainers themselves. FreeRTOS is not responsible for resulting newlib operation. User must be familiar with newlib and must provide system-wide implementations of the necessary stubs. Be warned that (at the time of writing) the current newlib design implements a system-wide
malloc()configENABLE_BACKWARD_COMPATIBILITY
The FreeRTOS.h header file includes a set of #define macros that map the names of data types used in versions of FreeRTOS prior to version 8.0.0 to the names used in FreeRTOS version 8.0.0. The macros allow application code to update the version of FreeRTOS they are built against from a pre 8.0.0 version to a post 8.0.0 version without modification. Setting
configENABLE_BACKWARD_COMPATIBILITYconfigNUM_THREAD_LOCAL_STORAGE_POINTERS
Sets the number of indexes in each task's thread local storage array.
configUSE_MINI_LIST_ITEM
MiniListItem_tListItem_tconfigUSE_MINI_LIST_ITEMMiniListItem_tListItem_tconfigUSE_MINI_LIST_ITEMMiniListItem_tListItem_tconfigUSE_MINI_LIST_ITEMconfigSTACK_DEPTH_TYPE
Sets the type used to specify the stack depth in calls to xTaskCreate(), and various other places stack sizes are used (for example, when returning the stack high water mark).
Older versions of FreeRTOS specified stack sizes using variables of type
UBaseType_tconfigSTACK_DEPTH_TYPEconfigMESSAGE_BUFFER_LENGTH_TYPE
FreeRTOS Message buffers use variables of type
configMESSAGE_BUFFER_LENGTH_TYPEconfigMESSAGE_BUFFER_LENGTH_TYPEsize_tconfigMESSAGE_BUFFER_LENGTH_TYPEuint8_tconfigMESSAGE_BUFFER_LENGTH_TYPEuint16_tconfigSUPPORT_STATIC_ALLOCATION
If
configSUPPORT_STATIC_ALLOCATIONIf
configSUPPORT_STATIC_ALLOCATIONIf
configSUPPORT_STATIC_ALLOCATIONIf
configSUPPORT_STATIC_ALLOCATIONvApplicationGetIdleTaskMemory()configUSE_TIMERSvApplicationGetTimerTaskMemory()
Examples of the callback functions that must be provided by the application to supply the RAM used by the Idle and Timer Service tasks if
configSUPPORT_STATIC_ALLOCATIONSee the Static Vs Dynamic Memory Allocation page for more information.
configSUPPORT_DYNAMIC_ALLOCATION
If
configSUPPORT_DYNAMIC_ALLOCATIONIf
configSUPPORT_DYNAMIC_ALLOCATIONIf
configSUPPORT_DYNAMIC_ALLOCATIONSee the Static Vs Dynamic Memory Allocation page for more information.
configTOTAL_HEAP_SIZE
The total amount of RAM available in the FreeRTOS heap.
This value will only be used if configSUPPORT_DYNAMIC_ALLOCATION is set to 1 and the application makes use of one of the sample memory allocation schemes provided in the FreeRTOS source code download. See the memory configuration section for further details.
configAPPLICATION_ALLOCATED_HEAP
By default the FreeRTOS heap is declared by FreeRTOS and placed in memory by the linker. Setting
configAPPLICATION_ALLOCATED_HEAPIf heap_1.c, heap_2.c or heap_4.c is used, and
configAPPLICATION_ALLOCATED_HEAPuint8_t
configSTACK_ALLOCATION_FROM_SEPARATE_HEAP
If
configSTACK_ALLOCATION_FROM_SEPARATE_HEAPpvPortMallocStackvPortFreeStackpvPortMallocStackvPortFreeStackIf
configSTACK_ALLOCATION_FROM_SEPARATE_HEAPExample implementation of
pvPortMallocStackvPortFreeStack
Example implementation of
pvPortMallocStackvPortFreeStackconfigGENERATE_RUN_TIME_STATS
The Run Time Stats page describes the use of this parameter.
configUSE_CO_ROUTINES
Set to 1 to include co-routine functionality in the build, or 0 to omit co-routine functionality from the build. To include co-routines croutine.c must be included in the project.
configMAX_CO_ROUTINE_PRIORITIES
The number of priorities available to the application co-routines. Any number of co-routines can share the same priority. Tasks are prioritised separately - see
configMAX_PRIORITIESconfigUSE_TIMERS
Set to 1 to include software timer functionality, or 0 to omit software timer functionality. See the FreeRTOS software timers page for a full description.
configTIMER_TASK_PRIORITY
Sets the priority of the software timer service/daemon task. See the FreeRTOS software timers page for a full description.
configTIMER_QUEUE_LENGTH
Sets the length of the software timer command queue. See the FreeRTOS software timers page for a full description.
configTIMER_TASK_STACK_DEPTH
Sets the stack depth allocated to the software timer service/daemon task. See the FreeRTOS software timers page for a full description.
configKERNEL_INTERRUPT_PRIORITY configMAX_SYSCALL_INTERRUPT_PRIORITY and configMAX_API_CALL_INTERRUPT_PRIORITY
Ports that contain a
configKERNEL_INTERRUPT_PRIORITYconfigMAX_SYSCALL_INTERRUPT_PRIORITYARM Cortex-M3 and ARM Cortex-M4 users please take heed of the special note at the end of this section!
configMAX_API_CALL_INTERRUPT_PRIORITYconfigMAX_SYSCALL_INTERRUPT_PRIORITYconfigKERNEL_INTERRUPT_PRIORITYNote in the following discussion that only API functions that end in "FromISR" can be called from within an interrupt service routine.
For ports that only implement
configKERNEL_INTERRUPT_PRIORITYconfigKERNEL_INTERRUPT_PRIORITYFor ports that implement both
configKERNEL_INTERRUPT_PRIORITYconfigMAX_SYSCALL_INTERRUPT_PRIORITYconfigKERNEL_INTERRUPT_PRIORITYconfigMAX_SYSCALL_INTERRUPT_PRIORITYA full interrupt nesting model is achieved by setting
configMAX_SYSCALL_INTERRUPT_PRIORITYconfigKERNEL_INTERRUPT_PRIORITYInterrupts that do not call API functions can execute at priorities above
configMAX_SYSCALL_INTERRUPT_PRIORITYFor example, imagine a hypothetical microcontroller that has 8 interrupt priority levels - 0 being the lowest and 7 being the highest (see the special note for ARM Cortex-M3 users at the end of this section). The picture below describes what can and cannot be done at each priority level should the two configuration constants be set to 4 and 0 as shown:
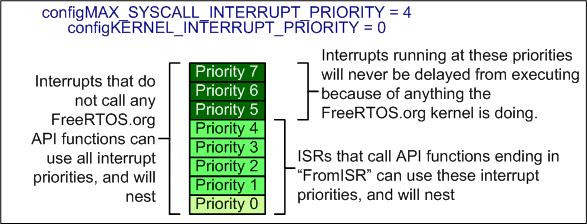 Example interrupt priority configuration
Example interrupt priority configuration
These configuration parameters allow very flexible interrupt handling:
-
Interrupt handling 'tasks' can be written and prioritised as per any other task in the system. These are tasks that are woken by an interrupt. The interrupt service routine (ISR) itself should be written to be as short as it possibly can be - it just grabs the data then wakes the high priority handler task. The ISR then returns directly into the woken handler task - so interrupt processing is contiguous in time just as if it were all done in the ISR itself. The benefit of this is that all interrupts remain enabled while the handler task executes.
-
Ports that implement
take this further - permitting a fully nested model where interrupts between the RTOS kernel interrupt priority andconfigMAX_SYSCALL_INTERRUPT_PRIORITYcan nest and make applicable API calls. Interrupts with priority aboveconfigMAX_SYSCALL_INTERRUPT_PRIORITYare never delayed by the RTOS kernel activity.configMAX_SYSCALL_INTERRUPT_PRIORITY -
ISR's running above the maximum syscall priority are never masked out by the RTOS kernel itself, so their responsiveness is not effected by the RTOS kernel functionality.
This is ideal for interrupts that require very high temporal accuracy - for example interrupts that perform motor commutation. However, such ISR's cannot use the FreeRTOS API functions.
To utilize this scheme your application design must adhere to the following rule: Any interrupt that
uses the FreeRTOS API must be set to the same priority as the RTOS kernel (as configured by the
A special note for ARM Cortex-M3 and ARM Cortex-M4 users: Please read the page dedicated to interrupt priority settings on ARM Cortex-M devices. As a minimum, remember that ARM Cortex-M3 cores use numerically low priority numbers to represent HIGH priority interrupts, which can seem counter-intuitive and is easy to forget! If you wish to assign an interrupt a low priority do NOT assign it a priority of 0 (or other low numeric value) as this can result in the interrupt actually having the highest priority in the system - and therefore potentially make your system crash if this priority is above
configMAX_SYSCALL_INTERRUPT_PRIORITYThe lowest priority on a ARM Cortex-M3 core is in fact 255 - however different ARM Cortex-M3 vendors implement a different number of priority bits and supply library functions that expect priorities to be specified in different ways. For example, on the STM32 the lowest priority you can specify in an ST driver library call is in fact 15 - and the highest priority you can specify is 0.
configASSERT
The semantics of the
configASSERT()assert()configASSERT()configASSERT()configASSERT()The example definition (shown at the top of the file and replicated below) calls
vAssertCalled()configASSERT()vAssertCalled()configASSERT()It is normal to define
configASSERT()Note defining
configASSERT()configASSERT()
If running FreeRTOS under the control of a debugger, then
configASSERT()
configINCLUDE_APPLICATION_DEFINED_PRIVILEGED_FUNCTIONS
configINCLUDE_APPLICATION_DEFINED_PRIVILEGED_FUNCTIONSIf
configINCLUDE_APPLICATION_DEFINED_PRIVILEGED_FUNCTIONSFunctions implemented in "application_defined_privileged_functions.h" must save and restore the processor's privilege state using the
prvRaisePrivilege()portRESET_PRIVILEGE()
This technique should only be use during development, and not deployment, as it circumvents the memory protection.
configTOTAL_MPU_REGIONS
FreeRTOS MPU (Memory Protection Unit) ports for ARM Cortex-M4 microcontrollers support devices with 16 MPU regions. Set
configTOTAL_MPU_REGIONSconfigTEX_S_C_B_FLASH
The TEX, Shareable (S), Cacheable (C) and Bufferable (B) bits define the memory type, and where necessary the cacheable and shareable properties of an MPU region.
configTEX_S_C_B_FLASHconfigTEX_S_C_B_SRAM
The TEX, Shareable (S), Cacheable (C) and Bufferable (B) bits define the memory type, and where necessary the cacheable and shareable properties of an MPU region.
configTEX_S_C_B_SRAMconfigENFORCE_SYSTEM_CALLS_FROM_KERNEL_ONLY
configENFORCE_SYSTEM_CALLS_FROM_KERNEL_ONLYconfigENFORCE_SYSTEM_CALLS_FROM_KERNEL_ONLY__syscalls_flash_start____syscalls_flash_end__configALLOW_UNPRIVILEGED_CRITICAL_SECTIONS
ARMv7-M MPU ports only (ARM Cortex-M3/4/7).
Set to 0 to prevent unprivileged application tasks from using the
taskENTER_CRITICAL()configENABLE_ERRATA_837070_WORKAROUND
Cortex-M4 MPU ports only.
When using Cortex-M4 MPU ports on a Cortex-M7 r0p0/r0p1 core, set
configENABLE_ERRATA_837070_WORKAROUNDconfigENABLE_TRUSTZONE
Set
configENABLE_TRUSTZONEconfigRUN_FREERTOS_SECURE_ONLY
If the application writer does not want to use TrustZone, but the hardware does not support disabling TrustZone then the entire application (including the FreeRTOS scheduler) can run on the secure side without ever branching to the non-secure side. To do that, in addition to setting
configENABLE_TRUSTZONEconfigRUN_FREERTOS_SECURE_ONLYconfigENABLE_MPU
Set
configENABLE_MPUconfigENABLE_FPU
If the target microcontroller includes a floating point unit (FPU), and you pass options to your compiler telling it to generate floating point instructions (as opposed to using emulated floating point operations), then the FPU support must be enabled.
Set
configENABLE_FPUconfigENABLE_MVE
Set
configENABLE_MVEconfigENABLE_MVEconfigHEAP_CLEAR_MEMORY_ON_FREE
If set to 1, then blocks of memory allocated using
pvPortMalloc()vPortFree()configHEAP_CLEAR_MEMORY_ON_FREEconfigHEAP_CLEAR_MEMORY_ON_FREEsecureconfigMAX_SECURE_CONTEXTS
ARMv8-M secure side ports only.
Tasks that call secure functions from the non-secure side of an ARMv8-M MCU (ARM Cortex-M23, Cortex-M33 and Cortex-M55) have two contexts – one on the non-secure side and one on the secure-side. Before FreeRTOS v10.4.5, ARMv8-M secure-side ports allocated the structures that reference secure-side contexts at run time. From FreeRTOS V10.4.5 the structures are allocated statically at compile time.
secureconfigMAX_SECURE_CONTEXTSsecureconfigMAX_SECURE_CONTEXTSINCLUDE Parameters
The macros starting 'INCLUDE' allow those components of the real time kernel not utilized by your application to be excluded from your build. This ensures the RTOS does not use any more ROM or RAM than necessary for your particular embedded application.
Each macro takes the form ...
where FunctionName indicates the API function (or set of functions) that can optionally be excluded. To include the API function set the macro to 1, to exclude the function set the macro to 0. For example, to include the
vTaskDelete()
To exclude
vTaskDelete()